Анотація
В даній курсовій роботі досліджено динамічні властивості мостової схеми двома методами:
- аналітичним - на основі перетворень Фур'є-Лапласа;
- математичного моделювання - на основі метода простору станів. Іл. . Бібл.
Технічне завдання
Методами перетворення Фур'є - Лапласа та простору станів провести аналіз динаміки процесів в лінійній містовій схемі, зовнішній вигляд якої подано на рисунку 1.

Рисунок 1 - Схема мостового чотириполюсника зрівноваженого типу
Зміст
Вступ
1 Аналіз процесів в динамічних колах, пристроях та системах методами перетворень Фур’є та Лапласа
1.1 Визначення передаточної функції
1.2 Визначення нулів та полюсів передаточної функції
1.3 Визначення та побудова годографу
1.4 Визначення, побудова амплітудно-частотної та фазо-частотної характеристик
1.5 Побудова логарифмічної АЧХ
1.6 Розрахунок перехідної характеристики
2 Аналіз процесів в динамічних колах, пристроях та системах методом простору станів
2.1 Поняття простору станів
2.2 Опис стационарної динамічної системи рівняннями стану у непрерервному часі
2.3 Визначення перехідної матриці стану
2.4 Еквівалентне зображення лінійної неперервної системи у дискретному часі
2.5 Дослідження динамічних властивостей мостового кола методом математичного моделювання
2.5.1 Моделювання вільного руху з ненульовими початковими умовами
2.5.2 Моделювання реакції динамічної системи на одиничний імпульс
2.5.3 Моделювання реакції динамічного системи на одиничну сходинкову функцію
Висновки
Список використаної літератури
ДОДАТКИ
ВСТУП
Пасивні чотриполюсники мостового типу знаходять поширення в радіовимірювальній техніці, в якості коректуючих елементів в системах автоматичного керування, при проектуванні джерел живлення та тощо. Вони в своєму складі містять резистори, конденсатори, індуктивності. В більшості випадків індуктивності не використовують, тому що на невисоких частотах вони мають неприйнятні габаритні розміри. Як відомо [ ], на основі пасивних чотириполюсників можливо реалізувати досить широкй клас передаточних функцій з точністю до постійного множника, причому число варіацій майже необмежене. Містові чотириполюсники мають певні особливості, а саме вони дозволяють реалізувати передаточні функції з додатніми нулями , тобто одержати немінімально -фазову ланку.
1 Аналізпроцесіввдинамічнихколах, пристрояхта системахметодамиперетвореньФур’єтаЛапласа
Зміст даного розділу та порядок розрахунків визначаються аналізом технічного завдання, теоретичними основами дисципліни " Сигнали та процеси в радіотехніці" та методичними вказівками викладача. Графічна частина виконана за підтримкою графічного пакету Advanced Grapher версії 1.61.
1.1 Визначення передаточної функції мостової схеми
Згідно технічного завдання електрична схема має наступний вигляд
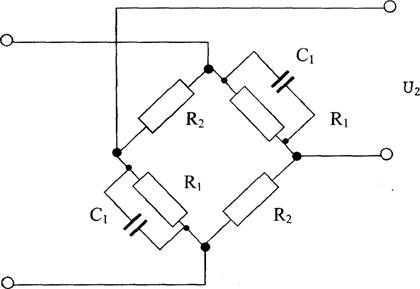
Рисунок 1.1 - Схема мостового чотириполюсника зрівноваженого типу
Передаточну функцію заданої схеми знайдемо операторним методом [ ], згідно якого

Якщо ввести нові змінні , а саме К= (R1-R2 )/(R1+ R2), Т1 =R1R2C1/(R1-R2 ), T2= R1R2/(R1+R2) , R1 > R2 , то вищезгадану передаточну функцію можливо звести до стандартного типу,

а відносно параметрів R1,R2,C1 зробимо наступне припущення щодо їх числових значень R1=3 кОм, R2=1 кОм, С1=10 мкФ. Тоді величини К=0,5, Т1=15×103с, Т2=0,75×103с.
1.2 Визначення нулів та полюсів передаточної функції
З вигляду передаточної функції очевидно, що маємо один нуль в точці 1/Т1, а полюси слід визначати як корені характеристичного поліному A(s). Оскільки характеристичний поліном має перший порядок , то коренів буде лише один,а саме р1= -1/Т2.
Діаграму нулів та полюсів подано на рисунку 1.2.

Рисунок 1.2 - Діаграма розташування нулів та полюсів
Аналіз розташування нулів та полюсів дають змогу зробити висновок, що дана динамічна ланка може бути віднесена до сталого кола, в якому для корекції частотної характеристки застосовано диференційний елемент.
1.3 Визначення та побудова годоргафа досліджуваного динамічного облєкту
Покладемо в комплексній змінній s=a+jw величину s=0 та визначимо комплексну амплітудно-частотну характеристику, виділивши окремо дійсну та уявну частини.


За одержаними даними будуємо годограф за допомогою графічного пакету Advanced Grapher . Вид годографа подано в додатках.
1.4 Визначення та побудова амплітудно-частотної та фазо-частотної характеристик
Амплітудно-частотну характеристику (АЧХ) визначимо як модуль комплексної частотної характеристки:

Фазо-частотну характеристку (ФЧХ) визначимо як

За одержаними даними побудовано АЧХ та ФЧХ , вигляд яких подано в додатках.
1.5 Побудова логарифмічної АЧХ
Ця характеристика будується за формулою

Зовнішній вигляд ЛАЧХ подано в додатках.
1.6 Розрахунок перехідної характеристики
Перехідна характеристика динамічного кола визначається як його реакція на одиничну сходинкову функцію і її можливо розрахувати через зворотнє перетворення Лапласа від комплексної частотної характеристики. Згідно [ ] ці розрахунки можливо вести методом розкладання передатньої функції на співмножники

Оскільки передаточна функція не має кратних полюсів, то згідно[ ] перехідна характеристика визначатимесь наступним виразом
![]()
Тут введено такі позначення a=1/Т2, . В нашому випадку a=0,0013, К= 0,5. Таким чином одержимо
![]()
Перехідна характеристика зображена в додатках , а імпульсна характеристика обчислювалась як похідна від перехідної характеристики.
2 Аналізпроцесіввдинамічнихколах, пристрояхта системахметодомпросторустанів
2.1 Зображення моделей лінійних кіл у просторі станів
Загальний вигляд моделі лінійного кола , описаної в термінах змінних станів, показано на рисунку 2.1.
